O que é o Gazebo?
Até agora você ouviu sobre o que é e por que usar a ferramenta ROS. Durante essas leituras, você deve ter ouvido falar de “simuladores” que são utilizados em conjunto com o ROS. Porém, o que é um simulador? Nesta seção, aprenderemos um pouco mais sobre o Gazebo, o simulador incorporado ao ROS que será utilizado durante as próximas aulas.

O que são simuladores
Durante o desenvolvimento de projetos, é importante saber como ele irá se comportar em determinados ambientes. Neste contexto, os simuladores tornam essa tarefa possível: eles permitem que você adicione constantes que controlam as condições do ambiente e faz os cálculos de física necessários. Isso inclui comportamentos como a gravidade, os contatos entre as rodas e o chão e o torque aplicado nas rodas.
Além disso, os simuladores suportam diversos sensores, como câmeras coloridas e de profundidade, IMU e GPS, que permitem que seu projeto interaja com o ambiente.
Com todas essas funcionalidades que as simulações proporcionam, o projeto final terá um comportamento próximo do desejado quando for colocado no ambiente real. Além de saber isso sem precisar construí-lo de fato (manufaturar e etc.), os resultados geralmente tem uma acurácia boa em comparação a modelos analíticos (ou seja, que são modelados baseados em equações matemáticas de movimento), e ajudam a encontrar comportamentos inesperados do sistema, além de facilitar análise e diversos tipos de testes. Tudo isso ajuda na redução de custos também, o que é muito importante em qualquer projeto.
O Gazebo
Ao utilizar o ROS para projetar robôs, também é possível utilizar simuladores que estão integrados a esse sistema. Uma dessas ferramentas é o Gazebo, que será utilizado e aprofundado durante o andamento deste curso.
O Gazebo é um simulador que tem como principais ferramentas:
- A capacidade de criar simulações dinâmicas;
- Gráficos 3D avançados;
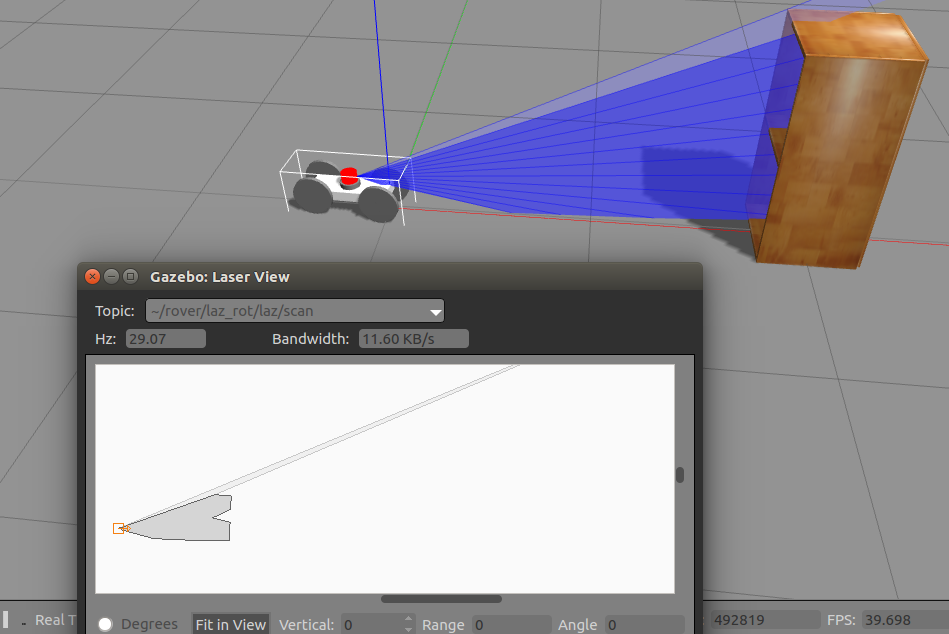
- Sensores com ruído;
- Uma variedade de plugins (para ver mais sobre o que são plugins, clique aqui);
- Modelos de robôs pré-prontos;
- A capacidade de executar o Gazebo em servidores remotos;
- Simulação em nuvem, utilizando ferramentas como o AWS Robotics e o Gzweb;
- Ferramentas de linha de comando.
Componentes básicos do Gazebo
As simulações feitas em Gazebo necessitam de alguns componentes para que possam ser executadas corretamente. Nesta seção, iremos entender um pouco mais o que é cada um desses componentes e entender sua utilidade.
Arquivos de mundo
Um dos componentes mais vitais de uma simulação é o ambiente de testes. Os arquivos de mundo são escritos em XML e contém as informações do ambiente de testes, como o modelo do mundo e o tipo de vista que a câmera nos proporcionará.
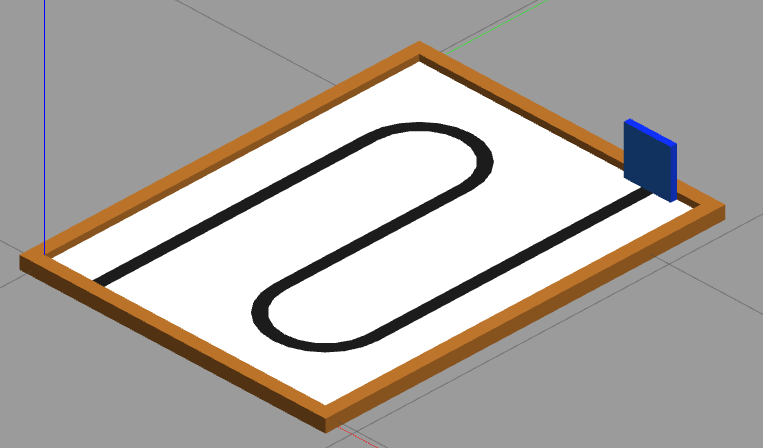
No projeto desenvolvido neste curso, o modelo do mundo é a pista com linhas curvas.
Arquivos URDF
O Universal Robot Description Format, ou formato de descrição universal de robô, é um tipo de arquivo responsável por processar o modelo do robô, juntando em seus arquivos características como os modelos, as juntas, as formas e as características físicas do robô. Estes arquivos também são escritos em XML.
Para mais informações sobre como funcionam os arquivos URDF, sugiro dar uma olhada na documentação oficial do ROS disponível nesse link.
Arquivos de modelo
Como citado acima, para gerar a aparência do carrinho e da pista são necessários arquivos de modelo. Nesse contexto, eles serão responsáveis pela parte estática do modelo, enquanto as características descritas no URDF são editáveis. Esses arquivos são extremamente importantes para que tarefas como geração de mundos e de componentes do carrinhos sejam facilitadas. Eles seguem o formato SDFormat - Simulation Description Format, que tem uma documentação disponível neste link. Para saber mais sobre a implementação de arquivos de modelo, sugiro ver a documentação disponível neste link.
Arquivos launch
Os arquivos de launch vão juntar tudo acima em apenas um arquivo para que sejamos capazes de abrir a simulação. Dentro do arquivo de launch, implementamos os nodes, o modelo do carrinho, da pista e os controles necessários para mover o carrinho. Para saber mais sobre arquivos de launch, sugiro dar uma olhada nesse link.
Abrindo uma simulação no Gazebo
Agora que você já entendeu um pouco mais sobre como funcionam os arquivos que gerarão a simulação, vamos ver como isso funciona na prática. Como dito anteriormente, quem junta tudo em um lugar só é o arquivo de launch, e é ele que chamaremos para iniciar nossa simulação.
O comando utilizado para abrir uma simulação é:
roslaunch modelo_carrinho gazebo.launch
Vamos entender cada parte do comando?
- O roslaunch:
Ele é o comando responsável por executar os arquivos de launch. Sua principal função é ser uma ferramenta que inicia e pausa os nodes do ROS.
- modelo_carrinho:
Aqui, você está se referindo ao nome do pacote. Falamos um pouco sobre pacotes no guia de instalação do ROS e você pode ler mais sobre pacotes no contexto de ROS neste link. Em resumo, um software do ROS é organizado em pacotes, e cada pacote contém nodes, bibliotecas e softwares externos.
- gazebo.launch:
Aqui, você está se referindo ao arquivo de launch que irá carregar o mundo.
Ainda tem dúvidas sobre como as simulações do Gazebo funcionam? Dê uma olhada nas documentações oficiais do ROS e do Gazebo:
E caso tenha mais dúvidas, não hesite em contatar os monitores da matéria!