Rodando o projeto no WSL!
Olá alunos!
Agora que vocês tem WSL, ROS, Gazebo e X Server devidamente instalados nos seus computadores chegamos a parte mais legal de todas, rodar o projeto! Para isso precisamos fazer uma pasta para conter os devidos arquivos. Primeiramente, certifique-se que seu servidor de display (X Server) está rodando. Caso contrário, não teremos a janela do Gazebo aparecendo na nossa tela. Tudo certo? Então abra seu WSL e rode os seguintes comandos para criar o diretório do projeto e entrar nele.
mkdir -p ~/PMR3100/src
cd PMR3100/src

Esse primeiro comando cria a pasta PMR3100 e dentro dela cria também a pasta src. Já o segundo, te leva para a pasta recém criada. Se acostume a ver esse cd já que ele será frequentemente usado nesse guia para navegar entre os diretórios usando a linha de comando. Como pode ver pelo ~/PMR3100/src$ em azul, estamos na pasta src.
Caso você tenha percebido, temos uma pasta com um nome mais genérico dentro de uma com o código da disciplina. É nessa pasta genérica onde os arquivos do projeto ficarão, enquanto que vamos usar o diretório da disciplina para conter os arquivos de construção. Pode soar meio confuso mas eventualmente, durante o restante do tutorial, tudo vai ficar mais simples.
Agora que temos as pastas, precisamos dos arquivos. Certifique-se que você se encontra no src e rode o seguinte comando:
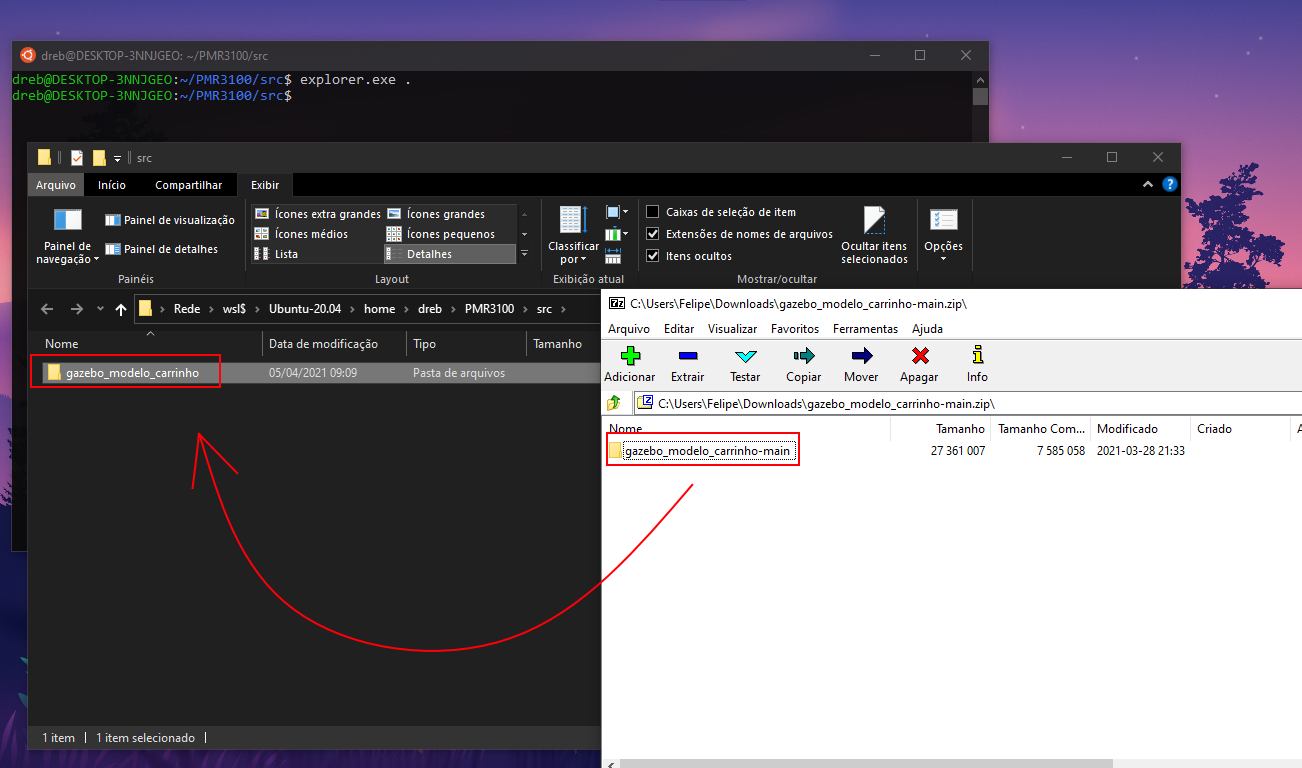
explorer.exe .
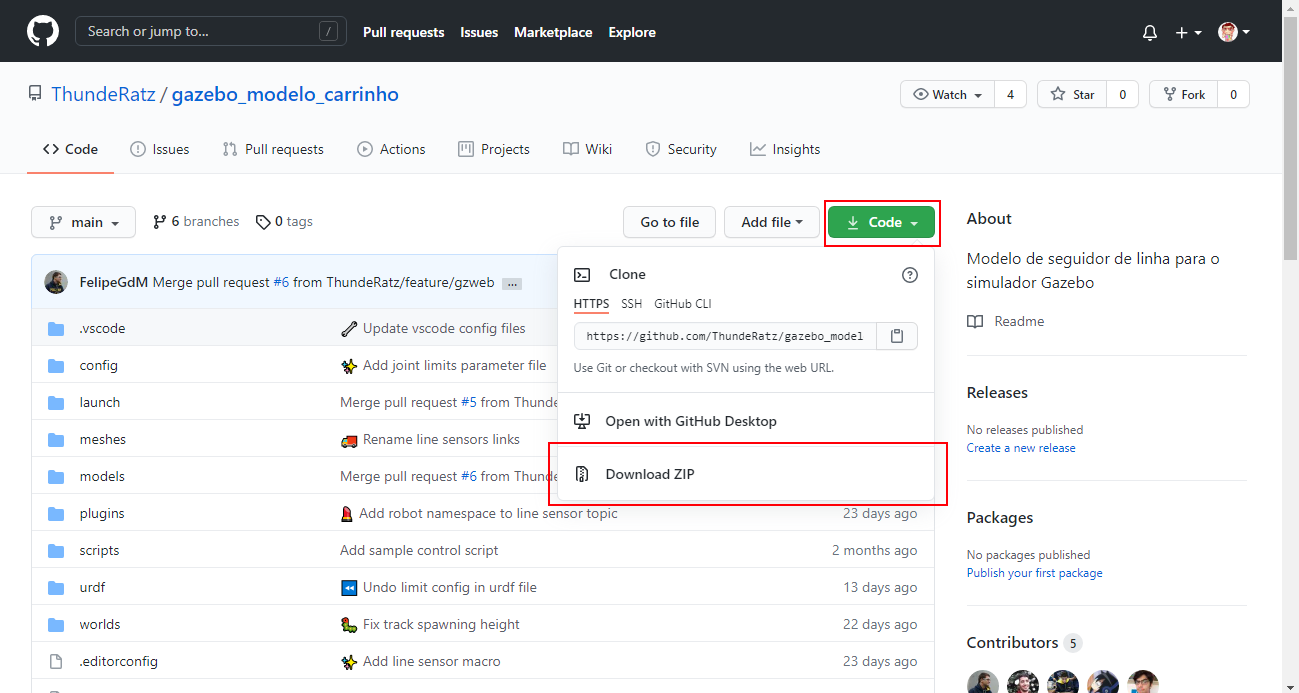
Isto vai abrir uma janela do explorador de arquivos do Windows dentro da pasta src. Aqui, vamos colocar uma pasta com os arquivos do projeto. Essa pasta deve ser baixada como zip no repositório do projeto. Abra a página, encontre o botão verde escrito Code e selecione a opção Download ZIP.
Com o ZIP em mãos, abra ele e transfira a pasta gazebo_modelo_carrinho-main para a pasta src. Por fim, renomeie a pasta gazebo_modelo_carrinho-main para gazebo_modelo_carrinho.
Agora que você tem os arquivos, chegamos em uma parte que pode dar problema, instalar ainda mais recursos. O projeto em si tem algumas dependências específicas que ainda não se encontram no seu computador. Para baixá-las, rode o comando a seguir:
sudo apt install ros-noetic-velocity-controllers python3-pygame
Para rodar o comando você vai ter que fornecer a sua senha já que faz uso do sudo.
Agora, volte para a pasta PMR3100 usando o comando:
cd ..
E finalmente execute o:
catkin_make
O que isso vai fazer é construir o ambiente do projeto, usando como base aquilo que você baixou do GitHub. Deve demorar um pouquinho, mas não se assuste. Apenas fique na paz e no aguardo. Assim que terminar, rode o comando a seguir:
source devel/setup.bash
E pronto, agora você só precisa usar o comando abaixo para abrir o Gazebo na sua tela juntamente com o lindo carrinho base da disciplina.
roslaunch modelo_carrinho gazebo.launch
Sempre que você fechar o terminal do WSL e voltar, você terá que executar o source devel/setup.bash dentro da pasta PMR3100. Caso contrário, você encontrará um erro ao tentar rodar o projeto.
É isso. Agora você já sabe rodar o projeto direto no Ubuntu. Se houver algum problema durante o tutorial entre em contato com algum dos monitores que estarão lá para te ajudar.
Daqui pra frente é programar o carrinho. Se divirta e que a disciplina seja um sucesso!